I voluntarily left Blue Tree Systems in 2010 to pursue a new opportunity in the vehicle telematics space.
The concept was to bring the benefits of telematics to the mainstream consumer,
in the form of a service called Personal Garage.
I also identified a B2B route-to-market in the form of a service called Company Garage,
aimed at Fleets and Fleet Management companies.
The company secured some seed funding from Enterprise Ireland, and I invested my own capital.
I was the sole employee, and drove both product development and customer development using Agile and Lean principles.
The hardware product – an OBD dongle - was completed to prototype stage and tested successfully.
I also had good traction with certain customers.

However, the concept was reliant on the availability of diagnostic information from vehicle manufacturers.
This was enshrined in recent European legislation (specifically, the
Euro 5 emissions regulation
and the new Motor Vehicle Block Exemption Regulation).
It transpired that the legislation was weak, allowing vehicle manufacturers to make it prohibitively expensive
for third-parties to create multi-brand tools for remote diagnostics.
Looking back, I think that the product was ahead of the curve.
Before the hype around "IoT", we were providing a platform that was extensible,
providing bespoke services to multiple different vertical markets.
Before the hype around "GDPR", we were highlighting the issue of data ownership and privacy.
The owner of the vehicle was the owner of the vehicle data, and they could voluntarily "opt-in" to share their data
with third-parties, using our platform as a data broker:
Krejuv is an attempted phonetic spelling of Creideamh, an Irish word meaning "belief" or "faith".
This is a critical requirement for any entrepreneur!
The Garage platform was designed to be a low-cost, high-performance vehicle telematics solution
for both consumers (Personal Garage) and fleets (Company Garage).
I developed a hardware device in the form of an OBD dongle, which can be easily installed in any passenger car or light commercial vehicle. In a miniature form-factor, the device packs:
Together with some contract developers, I developed firmware in C, using:
The firmware allows for over-the-air updates via FTP.
I elected to run the TCP/IP stack on the micro rather than on the GSM module, for several reasons:
As well as supporting legislated (emissions-based) diagnostics, I developed a reverse-engineering procedure for supporting proprietary (manufacturer-specific) diagnostics. For example, vehicle odometer is not available using the standardised protocols which are required for legislated diagnostics. Using a professional-grade scan tool to request the parameter of interest, we eavesdrop on the bus and decode the request and response frames. Usually, the protocol follows a standard such as mode 0x22 of GMLAN (GMW3110), KWP2000 on K-line or CAN (ISO 14230-1), or UDS on CAN (ISO 14229-1).
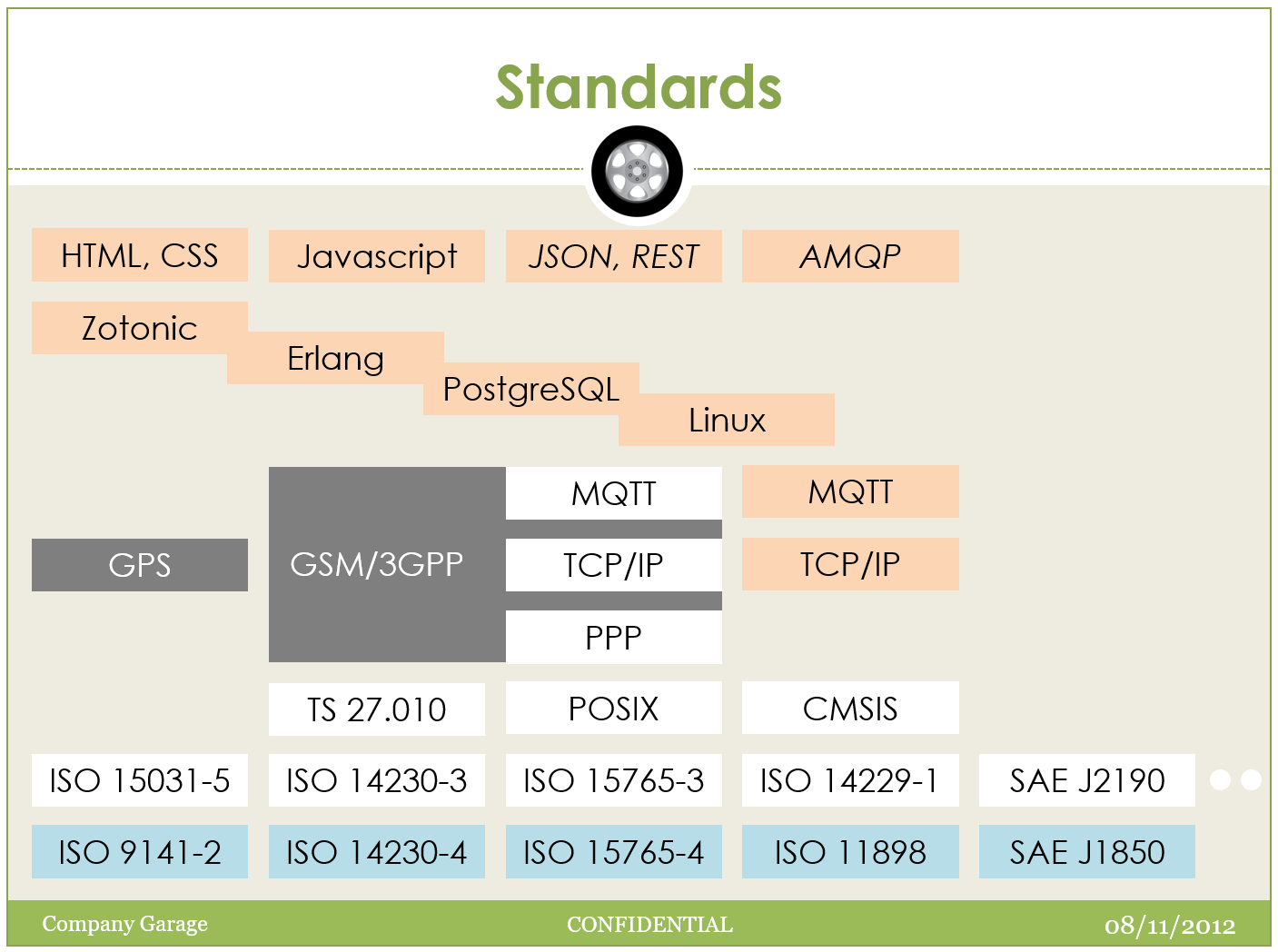
I researched several options for the wireless communications protocol between the vehicle and the
server, and I settled on MQTT.
MQTT is ideal for low-bandwidth noisy links such as GPRS. We deployed an open-source
broker implementation from the Mosquitto project, running on a Linux server.
Looking back, these were good choices. Both MQTT and Mosquitto have gone from strength to strength.
I identified a research partner in the Tyndall Institute, University College Cork. Using our 9-Degree-of-Freedom Inertial Measurement Unit, we are developing algorithms for dead-reckoning, for use in both GPS augmentation and accident reconstruction scenarios. Preliminary testing shows that it should be possible to record and play back up to 30 seconds of vehicle motion leading up to an accident, within an accuracy of 1m.
I also contracted a software developer to build upon the open-source driving simulator Rigs of Rods. This is a simulator with a strong physics engine which models how vehicles flex and deform as stresses are applied. We added code to allow pseudo-real-time telemetry to be sent to a standard MQTT client and from there to our back-office server. This can be used for product demonstration, driver training, product verification, etc.

I deployed a cloud-based development environment for the geographically-distributed development team using Atlassian OnDemand. This provides a hosted Subversion repository, tools for Agile project management, and a wiki for collaboratively-developed documentation.